Cosa sono i VRM e a cosa servono

DISCLAIMER
This Work: “Consigli per l’acquisto di RAM per Ryzen gen. 1 2 e 3 (Update 2019)” by R3d3x is licensed under CC BY-NC-SA 4.0.
Quest’opera è stata rilasciata con licenza Creative Commons Attribuzione – Non commerciale – Condividi allo stesso modo 4.0 Internazionale.
L’AUTORE DELLA GUIDA ORIGINALE è R3d3x, moderatore del forum HWreload.
Io ho solamente riportato la guida modificandola parzialmente, semplificandola, rendendola più semplice per i lettori e aggiungendo contenuti parziali rispetto la guida originaria.
Al seguente link troverete la guida originaria, sempre aggiornata con maggiori dettagli inseriti e indicati dall’autore R3d3x.
Cos’è un VRM
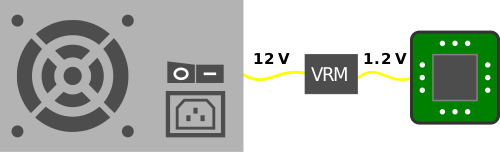
Il VRM (Voltage Regulator Module o Modulo regolatore di tensione) è un circuito integrato, che regola e decrementa la tensione in ingresso nella CPU.
Ciò agisce sulla tensione in arrivo dall’unità di alimentazione (Alimentatore a commutazione) che porta le varie rail, in particolare dalla 12 V dalla quale attinge la CPU e che la trasforma nella tensione in uscita che è solitamente pari a 1.2 V.
I VRM sulle schede madri si basano sulla conversione della Corrente Continua in altra Corrente Continua e per questo definito Convertitore DC-DC (Direct Current to Direct Current) o Convertitore step-down (buck).
Per essere un po’ più specifici, è necessario convertire una tensione più alta (per esempio 12 V) in un valore più basso (per esempio 1,2 V).
Partendo dalle basi nel nostro PSU arriva una corrente alternata con un valore efficace di 230V +/- 10% ad una frequenza di 50Hz +/- 1% (definito per normativa europea).
Dal PSU in poi questa corrente diventa corrente continua a 12V che passerà per il VRM fino ad arrivare alla CPU come 1,2V.
La corrente alternata è un’onda sinusoidale con un’ampiezza e un’intensità variabili a differenza della corrente continua che è più simile ad una linea retta.

Approfondendo sul Valore Efficace
In un’onda sinusoidale distinguiamo due valori, di picco (valore massimo) e tensione efficace.
In un’onda sinusoidale, i valori di picco sono 2 in un solo ciclo.
Il ciclo è concluso quando le tensioni raggiungono tutti i valori possibili, positivi e negativi, completando quindi questa S per poi ripartire all’infinito.
Un solo ciclo dura 20 ms, se 1 sec è composto da 1000 ms, 1000 ms / 20 ms dà come risultato una frequenza di 50 Hz ovvero quante volte questo ciclo si ripete in un secondo.
Il valore efficace è quindi dato dal V max * 0,707 (numero valido solo per onde sinusoidali), che è semplicemente l’inverso della radice di 2 (il numero di picchi in un ciclo).
1/√2 = 1/1,414 = 0,707
Il valore efficace di una corrente alternata è l’intensità della corrente continua (ampere) che, attraversando lo stesso conduttore, dissiperebbe per effetto Joule la stessa potenza della corrente alternata.
Ovvero un resistore, se collegato alla rete elettrica alternata, dissiperebbe una potenza variabile.
Se lo stesso fosse applicato ad una corrente continua avrebbe un valore medio intorno ai 230V.
SEMPLICE Approfondimento: differenza tra Alimentatori Lineari e Alimentatori a Commutazione
Funzionamento dell’alimentatore Lineare
1) Entra la 220V AC, da lì il trasformatore riduce il carico a 12V.
2) Il Ponte Raddrizzatore, con l’uso di diodi, raddrizza la corrente in una corrente unidirezionale (quindi va solo in avanti e non avanti e dietro) a onda intera o a semi onda.
3) Filtro a condensatore sfruttato per livellare la tensione a livelli richiesti.
4) Dopo il condensatore la tensione oscilla ancora un po’ (ripple) e quindi è necessario un regolatore di tensione realizzato con un circuito integrato (voltage regulator) o con un semplice diodo Zener, da lì l’uscita della DC.
Funzionano bene per basse potenze, ma se sale la potenza richiesta le dimensioni diventano troppo ingombranti in quanto la grandezza del trasformatore e del condensatore di filtro è inversamente proporzionale alla frequenza di ingresso della tensione alternata.
Poiché la frequenza della rete domestica è di 50 Hz (60 Hz in alcune nazioni), che è una frequenza molto bassa, il trasformatore ed il condensatore divengono molto grandi al crescere della potenza richiesta.
Utilizzare un alimentatore lineare per il PC sarebbe una follia in quanto avrebbe dimensioni e peso eccessivi.
La soluzione consiste quindi nell’uso di un alimentatore switching ad alta frequenza.
Caratteristiche Alimentatore Lineare
Ingombrante, pesante, poco efficiente (30-40%), costoso, struttura semplice, Interferenza Elettromagnetica (EMI) basso rumore.
Adatti per situazioni in cui c’è bisogno soprattutto di precisione esempio nell’Hi-Fi.
Genera rumore alla frequenza di rete quindi a 50-60Hz facilmente mitigabile.
I due problemi principali sono l’ingombro e la bassa efficienza dovuta alla dissipazione dall’integrato di regolazione di tensione, della restante parte inutilizzata.
Alimentatori Switching ad alta frequenza (50-100 kHz)
Sono piccoli, leggeri, efficienti (70-95%), economici, struttura complessa, EMI da filtrare assolutamente.
Vanno filtrati poiché funzionano a frequenze elevate dai 50 ai 100 kHz creando rumore elettronico alla frequenza di commutazione.
Grazie a ciò non c’è bisogno di PSU giganti in quanto viene innalzata ad alta frequenza prima di arrivare al trasformatore.
Sfruttando il PWM (Modulo di ampiezza di impulsi) che fa aumentare o diminuire il duty-cycle della tensione applicata al trasformatore in funzione del consumo del PC.
L’alimentatore si autoregola in funzione del carico che gli viene applicato.
Quando il PC consuma poco eroga una minore corrente sottoponendo i propri componenti critici ad un minore stress e quindi generando minore calore.
Questo vantaggio non si ha invece negli alimentatori lineari che sono progettati per fornire la loro potenza massima.
Ache quando questa non viene erogata, il risultato che la quantità di calore generata è rilevante.
Ciò costituisce un ulteriore inconveniente per questo tipo di dispositivo.
La struttura di un alimentatore a commutazione senza PFC (Power Factor Correction)
1) Entra la 220V (o a 120V AC), a seguire un filtro, per filtrare picchi e fenomeni indesiderati.
2) Commutatore di tensione (uno switcher) tra 125V e 220V, se si usa una 125V utilizzeremo il duplicatore di tensioni.
3) Raddrizzatore.
PSU Switching con PFC
1) Entra la 220V o a 120V AC, a seguire un filtro, per filtrare picchi e fenomeni indesiderati.
2) Raddrizzatore.
3) PFC Attivo.
4) Switcher primario e secondario.
5) Trasformatore (entra ed esce un’onda quadrata e quindi abbiamo già la Corrente Continua, e per questo detti convertitori DC-DC).
6) Ponte raddrizzatore.
7) Filtro.
8) PWM: è isolato dalla zona del primario grazie ad un piccolo trasformatore ad isolamento.
Funziona da regolatore in un anello chiuso.
Ovvero se la tensione che esce dal filtro non è corretta, manda un segnale a monte, cambiando il duty cycle applicato al transistor.
Per tali motivi controlla più attentamente le tensioni.
9) Isolatore, escludendo quindi eventuali protezioni etc.
Struttura Base di un VRM
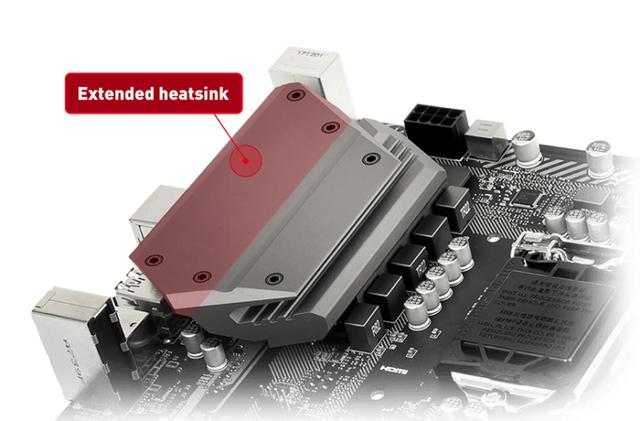
Al di sopra della componentistica principale della scheda madre ritroviamo gli heatsink (tradotto come dissipatore ovvero componente in metallo).
Quest’ultimo attua una dissipazione passiva del calore, diventa attiva con la presenza di una ventola.
Rimuovendoli ci permettono di vedere le componenti sottostanti come appunto MOSFET, PWM, Driver e molto altro.
Senza guardare il PCB (Printed Circuit Board o Circuito Stampato) nudo da qualsiasi heatsink è impossibile recensire una scheda madre o una scheda video.

Principalmente gli heatsink vanno a posizionarsi sopra i MOSFETs (in rosso nella foto in alto).
In genere questi sono due per ogni fase, svolgono funzioni diverse e vengono chiamati High-Side MOSFET (o Hi-FET) e Low-Side MOSFET (o Lo-FET).
Colorati di azzurro in foto, troviamo gli Induttori o Chokes ovvero quei cubetti spesso visibili anche sotto gli heatsink.
Colorati di verde in foto, troviamo i Condensatori o Capacitors, esistono di varie tipologie questi sono gli elettrolitici di forma cilindrica.
Queste sono le componenti principali della cosiddetta Fase (o Phase) che insieme al PWM e alla restante circuiteria formano il cosiddetto VRM.
Questo spiega il primo grande fraintendimento nel mondo tech, infatti il VRM non è un’unica cosa ma un insieme di parti.
Ricapitolando quindi da cosa è composto il VRM e da cosa sono composte le fasi in maniera sintetica:
VRM = PWM + Fasi + Condensatori + Altro
Fasi = Driver MOSFET + MOSFETs + Induttori
Componenti Principali del VRM nel dettaglio

MOSFET
Metal Oxide Semiconductor Field Effect Transistor: sono interruttori (o switcher) con cui è possibile controllare i circuiti.
I transistor sono considerati i più importanti componenti dell’elettronica al momento.
Di solito, i cosiddetti transistor ad effetto di campo (quindi anche chiamati solo FET) a canale n sono utilizzati nei VRM per le schede madri ATX.
In breve, questi consistono in un canale di corrente di un semiconduttore la cui resistenza è controllata da un campo elettrico.
Detto canale di corrente (Current Channel) si pone tra i due elettrodi, la sorgente (Source) e il pozzo (Drain), attraverso del materiale semiconduttore elettricamente isolato chiamato porta (Gate).
Il controllo è eseguito in tensione, poiché è noto che ogni tensione elettrica è accompagnata da un campo elettrico.
La sorgente (Source) e il substrato semiconduttore drogato con p sono elettricamente collegati, poiché una differenza di potenziale tra sorgente e substrato può modificare le proprietà elettriche dell’intero FET.
Questa connessione è chiamata diodo inverso (o body diode o inverse diode) e di conseguenza viene disegnata nel simbolo di commutazione come un diodo, che blocca un flusso di corrente dallo scarico alla fonte.


Induttore (Inductor o nello specifico Choke)
L’induttanza ha il compito di opporre una resistenza ai 12 V dell’alimentatore in modo da portarlo alla tensione richiesta tramite la regolazione svolta dai MOSFET.
Le induttanze non producono calore ma creano un “campo magnetico” attorno a loro man mano che trattengono corrente opponendosi ai cambiamenti di corrente.
I campi magnetici sorgono con ogni flusso di corrente attraverso un conduttore elettrico.
Se questo conduttore elettrico è ora avvolto attorno a un nucleo (questo nucleo può essere anche dell’aria o un pezzo di acciaio o di ferrite) si forma quindi una bobina, e quindi il campo magnetico decade in quel punto.
Dal punto di vista elettrico, le bobine resistono ai rapidi cambiamenti di corrente e accumulano il campo magnetico quando la corrente lo attraversa, questa proprietà è chiamata induzione magnetica.
Le bobine utilizzate nei VRM sulle schede madri sono solitamente fili di rame su un nucleo ferrimagnetico.
I ferrimagnetici possono aumentare notevolmente l’induttanza della bobina in virtù della loro magnetizzabilità simile a quella dei ferromagneti.
Tuttavia i ferromagneti sono isolanti, quindi non c’è alcuna perdita se introduciamo delle correnti parassite nel nucleo.
Inoltre, queste bobine sono messe in isolatori rigidi (come spesso vediamo sulle schede madri quei quadratini), in modo che l’oscillazione meccanica della bobina possa essere soppressa sul nucleo ad alta frequenza, che può portare ad un ronzio udibile ad alta frequenza.

Condensatori (Capacitor)
I condensatori fanno da filtro, e sopprimono i picchi di tensione.
Un condensatore è fondamentalmente la controparte della bobina, resiste ai rapidi cambiamenti di tensione.
La ragione di ciò è l’energia immagazzinata dal campo elettrico, che si accumula tra i due elettrodi del condensatore quando viene applicata la tensione.
L’energia dal campo può continuare a mantenere la tensione elettrica per il momento in cui, per esempio, dovrebbe essere spenta bruscamente dagli interruttori.
Vengono utilizzati i cosiddetti condensatori elettrolitici, poiché con essi si possono ottenere capacità elettriche molto elevate.
Ciò è dovuto alla piccola distanza tra gli elettrodi, che è possibile perché un elettrodo è fatto di alluminio mentre l’altro è un acido debole.
Il dielettrico è solo un sottile strato di ossido sull’anodo di alluminio.
Nuovi e sempre più utilizzati sono anche i dry Tantalum Elkos.
Il tantalio come anodo viene sinterizzato per una superficie più grande e immerso nella soluzione di nitrato di manganese.
Con il riscaldamento, il biossido di manganese solido si forma come un secondo elettrodo.
Ogni condensatore è costruito per avere una quantità specifica di capacitanza.
La capacità di un condensatore indica la quantità di carica che è in grado di memorizzare, più capacità significa più capacità di immagazzinare una carica.
L’unità standard di capacità viene chiamata Farad, abbreviato F.
Un farad ha molta capacità, anche 0.001F (1 millifarad – 1MF) è un grande condensatore.
Sulla scheda madre si può subito notare che nel VRM ci sono principalmente 2 tipi di condensatori uno a 12V e uno a 3V dovendo filtrare tensioni diverse.
Infatti quelli a 12V filtrano le tensioni in arrivo al VRM, mentre quelli a 3V fanno parte delle fasi e filtrano la tensione che sta per uscire dal VRM verso la CPU.

Circuiti integrati o IC (Integrated Circuit)
Questo termine copre tutti i componenti che combinano un intero gruppo di componenti in un unico alloggiamento.
Questo viene fatto oggi da strutture elettricamente conduttive create su una sottile piastra di semiconduttore con tecniche di esposizione e / o incisione complesse, che hanno le proprietà dei singoli componenti.
I conduttori di ingresso e di uscita sono quindi collegati ai perni dell’alloggiamento, in modo che il circuito con larghezze strutturali parzialmente inferiori alla gamma dei micron possa essere installato nella sua applicazione e utilizzato lì.
Tali circuiti in VRM sono il controller PWM che controlla l’intero VRM e altri controlli come i Driver MOSFET.
La scheda madre ASUS in foto sopra, dove sono segnati chokes mosfet etc. ha incorporato anche un EPU (Energy Processing Unit).
Quest’ultimo è un chip di risparmio energetico in tempo reale del sistema che rileva automaticamente il carico del sistema corrente e modera in modo intelligente l’utilizzo di energia.
Va disabilitato durante un overclock spinto, considerando la sua funzione integrata.

Modulazione di Larghezza di Impulso o PWM
Lo strumento per un convertitore di switch con controllo attivo è il cosiddetto Pulse Width Modulation, ovvero il PWM.
Un controller PWM di fascia alta permetterà una miglior regolazione della tensione diretta alla CPU e un segnale di maggior qualità.
Le caratteristiche di tale segnale sono la frequenza, il ciclo di lavoro (Duty Cycle) e il valore di picco.
Anche un segnale PWM è sempre periodico, quindi si ripete nel tempo, che è stato definito come un punto.
In questo periodo, il segnale può assumere due stati: High o Low o 1 o 0, ecc.
Per quanto tempo si applica uno dei due stati, questo determina il ciclo di lavoro (Duty Cycle).
Generalmente viene espresso come percentuale del periodo totale.

Spiegazione approfondita del PWM
Ad esempio, di seguito in nero è un segnale PWM con il Duty Cycle del 10% su più periodi.
Se per esempio il totale di un periodo è di 10 secondi, e abbiamo segnale per 1 solo secondo, abbiamo il 10% di Duty Cycle.
Tradotto in termini di Volt in entrata nella CPU modulati dal segnale PWM: U DC = 12V * 10% = 1.2V Input
+12 V la tensione di ingresso imposterà teoricamente una tensione di uscita di +1,2 V quando il controller è impostato ad un Duty Cycle pari al 10%.
In passato, il VRM utilizzava il controllo analogico.
Questo tipo di controllo non era molto preciso e poteva richiedere più tempo per reagire a picchi e a cadute di potenza.
Le schede più recenti utilizzano VRM a controllo digitale, che reagisce molto più rapidamente e mantiene la CPU e gli altri componenti alimentati in modo più fluido.
funzione del PWM
Il PWM indica il valore della tensione in volt (Voltage) da erogare alla CPU, e la regola tramite apertura e chiusura dei MOSFET.
Lo fa utilizzando un segnale PWM con il quale si va a gestire anche la Switching Frequency (tradotta come frequenza di commutazione, ovvero la frequenza di accensione e spegnimento del MOSFET).
In genere i controller digitali vanno da valori di Switching Frequency da 350 KHz a 500 KHz.
Più la velocità di questa commutazione sarà elevata, più la tensione erogata al vostro processore sarà precisa e stabile, ma a sua volta aumenterà il valore di current loss ovvero la dispersione termica dei MOSFET durante il loro cambiamento di stato da acceso a spento.
Quindi ad un valore di Switching Frequency di 350 KHz, il cambio di stato dei MOSFET sarà meno veloce, e la tensione meno precisa e stabile (rispetto ai 500KHz) ma ci saranno meno perdite di energia disperse in calore.
Mentre invece ad un valore di Switching Frequency di 500 KHz, il cambio di stato dei MOSFET sarà più veloce, e la tensione più precisa e stabile (rispetto ai 350KHz) ma ci saranno più perdite di energia disperse in calore.
Più dispersione di calore significa che i vostri MOSFET inizieranno a diventare sempre più caldi.
Ciò significa che potrebbero raggiungere il loro rating (valore limite) e superarlo andando a lavorare a temperature per le quali non sono stati progettati, accorciando la vita della vostra scheda madre.
Ciò incide anche sulla vita dei condensatori.
Se non rilevato questo aumento di temperature dal sensore preposto, e nel caso in cui non siano prevenuti i danni con un preventivo arresto delle tensioni, potrebbe portare alla rottura del MOSFET bruciatosi per le temperature di esercizio troppo alte.

Funzionamento Approfondito del VRM
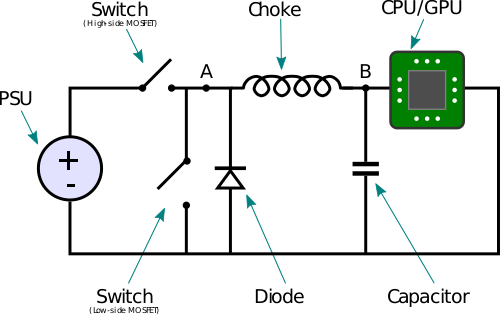
Il MOSFET High Side chiude il circuito lasciando passare per un breve lasso di tempo la corrente.

Al punto A abbiamo quindi 12 V.
Quando la 12 V viene applicata all’induttore, l’induttore crea un campo magnetico che crea una caduta di tensione sull’output.
Se il lasso di tempo aumenterebbe, in base la sua crescita, la tensione al punto B sarebbe maggiore, fino ad arrivare ai 12V.
Prima che ciò avvenga si apre il circuito nell’High Side MOSFET, altrimenti la CPU si friggerebbe in un baleno.
L’induttore dà il tempo necessario a chiudere il MOSFET grazie alla caduta di tensione, altrimenti arriverebbe subito a 12V.
Naturalmente nel lasso di tempo che è aperto non avremo corrente (in un circuito aperto non passa corrente, come quando mettete un tasto su 0 spegnete quel dispositivo, mentre su 1 lo accendete).
Da qui però avremo una seconda parte composta dal Low Side MOSFET, dall’induttore e dal condensatore.
L’induttore funge da generatore e ha un campo magnetico finché l’energia passa, se non passa collassa il campo magnetico in breve tempo.
Nasce però un problema senza il MOSFET Low Side, brucerebbe l’High Side per un picco di tensione o flyback.


Aprendo quindi il circuito nell’High Side MOSFET, in A abbiamo 0 V.
L’induttore è ancora bello carico dal precedente passaggio poiché è come un “ingorgo” lento a smaltire le macchine.
Il campo magnetico inizia quindi il suo collasso.
La corrente è presente nel punto B, ma quest’ultima darebbe un picco di tensione quando riapriamo il MOSFET High Side trovandosi a 12V.
Per questo c’è un diodo detto flyback (ovvero per l’improvviso picco di tensione) che lo elimina chiudendo l’interruttore Low Side MOSFET.
Approfondimento del VRM
Quando il MOSFET si apre, la corrente istantaneamente dovrebbe andare a zero, l’induttore tende però ad impedire questa repentina diminuzione.
La tensione sul Drain del MOSFET di conseguenza tende a salire a valori molto elevati.
Immaginiamo il MOSFET che si apre come una resistenza che, improvvisamente, diventa molto elevata.
L’induttore tenta di far passare in questa “resistenza elevata” la stessa corrente presente quando il MOSFET si comporta come un interruttore chiuso.
Di conseguenza la tensione ai capi del MOSFET, per la legge di ohm, deve quindi aumentare (V = R x I).
In pratica la tensione sul Drain arriva a valori molto elevati, molto superiori alla tensione di alimentazione danneggiando il MOSFET.
Per evitare questo fenomeno distruttivo viene inserito in parallelo un diodo, durante la conduzione del MOSFET nel diodo non passa corrente, in quanto polarizzato inversamente.
La stessa corrente che prima attraversava il MOSFET ora passa nel diodo “di ricircolo”, in pratica “va in salita”.
Ovviamente questa situazione si esaurisce abbastanza rapidamente, mancando generatori in grado di mantenere nel tempo il passaggio di corrente.
Nel circuito non è presente alcuna tensione superiore a quella di alimentazione e quindi non c’è il rischio di distruzione del MOSFET.

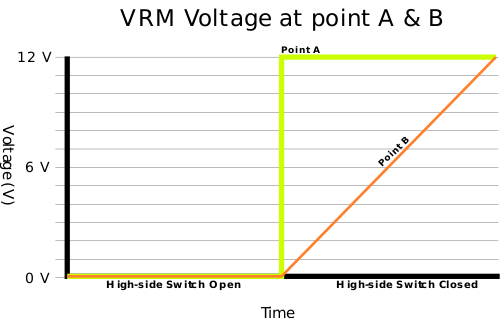
Tensione costante del circuito
L’obiettivo finale del circuito è fornire una tensione costante a nostra scelta.
Su un CPU moderno questa dovrebbe essere di circa 1,2 volt.
Per ottenere 1,2 V, il circuito deve interrompere la carica dell’induttore quando la tensione nel punto B raggiunge 1,2 V.
Una volta che ciò accade, la tensione inizierà a scendere e il circuito tornerà a caricare l’induttore.
L’intero ciclo viene ripetuto per sempre attraverso una tecnica nota come modulazione dell’ampiezza dell’impulso o PWM, mantenendo la tensione media alla tensione operativa desiderata.
Ad un duty cycle di circa il 50%, la tensione di uscita al punto B sarà 6 V.
Per ottenere il nostro desiderato 1.2 V il ciclo di lavoro dovrebbe essere del 10%.
PWM e Duplicatori (Doublers)
Quello che determina l’apertura e la chiusura dei MOSFET è un PWM insieme ad un Driver MOSFET (spesso abbreviato Dr.MOS) e nel caso anche ad un Doubler (Duplicatore).
Dato che la CPU non è costante con le richieste, il PWM corregge il ciclo tramite feedback, in base alle richieste della CPU.
Il PWM è deputato a gestire l’apertura degli High MOSFET di ogni fase.
Il PWM scandisce il tempo per ogni fase.
Naturalmente il PWM deve essere scelto in modo tale da riuscire a gestire il numero di fasi che possiede la motherboard.
In caso contrario le altre fasi in più non possono essere gestite in quanto vanno oltre le competenze reali del PWM e non credete che non ci siano state scelte di questo genere.
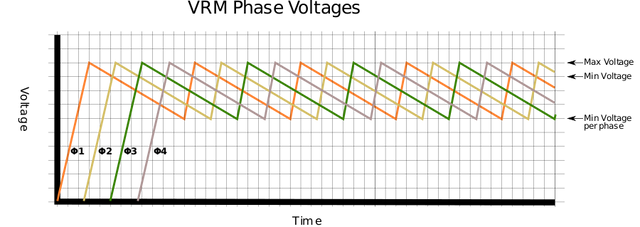
Come vedi sotto ogni scaglionamento delle fasi si genera una catena continua di tensione, che crea un’oscillazione della tensione (Ripple) tra un valore detto Max Voltage (Tensione Massima) e un secondo valore detto Min Voltage (Tensione Minima).
Quando si passa ad un’altra fase la tensione continua a scendere, ma non fino a 0 V, toccando un punto chiamato Min Voltage per Phase (Tensione minima per Fase).

VRM Multi Fase o Fasi Parallele
Considerando le multi fasi questo permette alla CPU di non rimanere senza tensione in quel determinato periodo.
Più fasi ci sono, meno si osserva l’effetto a catena perché c’è una riduzione nell’ampiezza dell’onda di ripple e quindi di corrente.
Inoltre, con più fasi la riduzione dell’effetto si riduce anch’esso.
Ossia, passando da 2 fasi a 4 fasi, la riduzione del ripple è decisamente maggiore che passare da 6 fasi a 8 fasi o a 10.
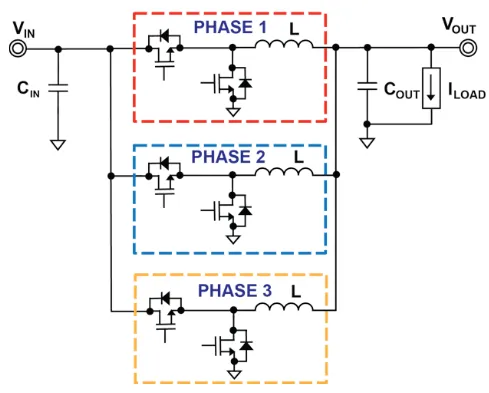
Le Fasi sono guidate da un controller PWM che di solito arriva a gestire un massimo di 4, 6 o 8 fasi reali.
Ci sono alcuni PWM di classe server, che arrivano fino a gestire anche 16 fasi reali, ma la stragrande maggioranza dei PWM, sono PWM fino ad 8 fasi reali e solo grazie ad un doubler (sdoppiatore o duplicatore) ritroviamo un aumento del numero delle fasi tramite un PWM da 4 a 8 fasi.
Spesso gran parte delle schede madri con 12, 14 o 16 fasi; utilizzano doubler e non un PWM di fascia server (queste sono composte da 6 segnali ad esempio sdoppiati in 12 segnali diretti in 12 fasi e non più 6 segnali diretti in 6 fasi.).

Duplicatore (Doubler): Fasi Vere (True Phases) e Fasi False (Virtual Phases)
Un duplicatore di fase (doubler) raddoppia il numero di fasi generando due segnali intercalati che si formano usando l’originale.
L’uso di duplicatori generalmente aumenta i costi perché la scheda madre possiede il doppio della quantità di circuiti integrati richiesti.
Ciò però riduce molte cose, come la corrente di carico su una data fase in modo simile a una “multi-fase” vera ma senza i benefici della più stretta tolleranza di tensione.
È anche una soluzione molto più comune che si trova su molte schede madri che pubblicizzano 8 o 16 fasi (composte rispettivamente da 4 e 8 fasi “reali”).

I termini True Phase e Virtual Phase sono stati sviluppati per distinguere tra le fasi che provengono direttamente dal controller PWM e i vari altri schemi come quelli utilizzati dai duplicatori.
L’uso di fasi virtuali può a volte indurre in errore a credere che la scheda madre abbia un VRM migliore di quello che effettivamente fa.
In oltre c’è una terza tipologia di fase, ovvero le Fasi in Parallelo, ovvero 2 fasi che sembrano 2 ma sono in parallelo fra loro, e risultano soltanto come un’unica “grossa” fase.
Il numero di fasi naturalmente non aumenta con quelle Virtuali o in Parallelo ma, la qualità delle fasi aumenta.
In questo modo si migliora l’uscita della tensione e la temperatura di esercizio anche se magari non arrivano a fare quello che farebbe una fase in più.
Questo significa che contare i Choke (Induttori) è inutile, poiché potrebbero essere in realtà meno se sono messe in parallelo o se utilizzano fasi virtuali.
Un esempio di schede madri con fasi in parallelo sono la Gigabyte B450 Aorus Pro, B450 Aorus M, X470 Ultra Gaming, tutte dichiarano 8+3.
La MSI con la X470 Gaming Plus, invece di mentirvi come fa Gigabyte, preferisce non dire proprio che la sua MB è una 8+2 fasi anche se in realtà è una 4+2.
E ancora l’ASRock con la B350M Pro4, fa come MSI, non indica che il suo 6+3 è in realtà un 3+3.
Lo stesso fa ASUS con la ROG STRIX Z390-G, questa non è una 8+2.





sintesi sui VRM
Quindi circuito chiuso in High Side MOSFET, arrivano 12V al punto A passa per l’induttore e appena il punto B raggiunge 1,2 V si stacca (10% del duty cycle quindi per esempio su 1 secondo rimane aperto per 0,1 secondo), qui c’è la parte secondaria che evita il flyback (picco di tensione) nel punto B grazie al diodo e al Low Side MOSFET.
Naturalmente il lavoro del MOSFET genera un enorme quantità di calore, maggiore rispetto a tutti gli altri componenti del VRM, sono quindi necessari dei buoni heatsink al sopra della zona dei MOSFET.
La scelta migliore per questi Heatsink è a forma di lamelle, per aumentare il rapporto superficie/volume.
Ancora meglio se sull’heatsink dei VRM fosse posta una ventola come si fa per le schede video.
I MOSFET sono componenti fragili e la loro rottura, o anche un numero insufficiente di MOSFET o fasi rispetto alla piena potenza, può essere causata da un over-heat o un over-capacity, causando la morte della scheda madre.
Il carico è suddiviso tra le fasi, che forniscono una frazione della potenza richiesta dalla CPU, creando un continuum di tensione grazie alla sincronizzazione delle varie fasi data dal PWM che deve essere in grado di gestire un determinato numero di fasi e non deve essere quindi sottodimensionato rispetto alle fasi stesse.
Inoltre il PWM cerca di evitare i Voltage Drop o anche detto VDrop, ovvero le cadute di tensione.
Un sufficiente numero di fasi con un buon PWM, possono garantire una migliore stabilità dell’overclock con tensioni più esigue o raggiungere tensioni maggiori e reggere maggiormente OC più spinti ed estremi.
Fasi totali, Acronimi e differenze tra Mainboard AMD e Intel
Nelle specifiche della scheda madre non vi diranno mai se le fasi sono fasi vere o fasi false, e la composizione quindi dei VRM.
Quasi sicuramente vi diranno il numero di fasi totali che montano, quindi bisogna fare attenzione che le fasi totali non siano tutte per la CPU, ma si dividano in questo modo anche in base al produttore della CPU.
Con schede madri AMD abbiamo un Main VRM e Minor VRM:
- Il Main VRM è composto da Voltage Core della CPU (acronimo V CC o V Core) e Voltage System on Chip (acronimo V SoC) che modula le tensioni per il resto della mainboard e per l’iGPU.
- Il Minor VRM è composto da Voltage DRAM (acronimo V DRAM) ovvero le fasi per la RAM.
In poche realtà troverete esempi completi come questo:
[6+6]+[2]+[1] quindi [VCore]+[VSoC]+[VDRAM]
Con le schede madri Intel abbiamo un Main VRM e Minor VRM:
- Il Main VRM è composto dal Voltage Core (acronimo V CC o V Core) e dal Voltage per la iGPU (acronimo V CC GT o V GPU).
- Il Minor VRM è composto dal Voltage per l’Integrated Memory Controller o IMC (acronimo VCCIO o VTT) e dal Voltage per il System Agent (acronimo VCCSA) utilizzato per migliorare la stabilità durante l’OC tramite il BLCK.
- Quando vi è per iscritto qualcosa sui VRM Intel, in genere troveremo scritto 4*2+1 o 8+2, con i quali intendiamo quindi il primo che è VCC e il secondo che è VCCGT.
In poche realtà troverete esempi super completi come questo:
[6+6]+[2]+[1]+[1]+[1] quindi [VCC]+[VCCGT]+[VCCIO]+[VCCSA]+[VDRAM]
FAQ (Frequently Asked Question)
Quali vantaggi hanno più fasi reali?
1) Meno corrente ai MOSFET e all’induttore
Indicando con “n” il numero delle fasi, l’intensità corrente per una fase (in inglese phase) corrisponde a:
Intensità per Fase (phase) = Intensità totale / numero di fasi
↓
I pp = I tot / n
- Se abbiamo 120 Ampere in totale, questi si divideranno in egual modo su 4 fasi quindi con 120 / 4 = 30 A
- Se abbiamo 120 Ampere in totale, questi si divideranno in egual modo su 6 fasi quindi con 120 / 6 = 20 A
- Se abbiamo 120 Ampere in totale, questi si divideranno in egual modo su 8 fasi quindi con 120 / 8 = 15 A
- Se abbiamo 120 Ampere in totale, questi si divideranno in egual modo su 12 fasi quindi con 120 / 12 = 10 A
- Se abbiamo 180 Ampere in totale, questi si divideranno in egual modo su 4 fasi quindi con 180 / 4 = 45 A
- Se abbiamo 180 Ampere in totale, questi si divideranno in egual modo su 6 fasi quindi con 180 / 6 = 30 A
Pertanto, con più fasi è possibile utilizzare correnti più grandi ma senza modificare i componenti oppure utilizzando componenti meno affidabili per dirigere le stesse correnti attraverso il convertitore.
2) Minori picchi di corrente o ripple (oscillazioni di tensione) residui sui condensatori di ingresso e di uscita
Il vantaggio di più condensatori è una conseguenza data dal primo vantaggio sopra menzionato.
L’altezza dei picchi della corrente di ingresso è infatti dimezzata.
Pertanto, con due fasi, un maggiore intensità di corrente può fluire attraverso il convertitore rispettando le disposizioni per il ripple residuo, rispetto ad una con una fase.
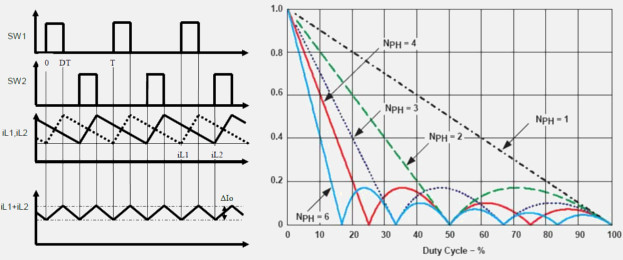
Il diagramma in alto a sinistra mostra come vengano divisi i picchi tra due correnti in entrata.
Quello in basso a sinistra mostra con una linea tratteggiata come sarebbe l’estensione dei picchi di corrente nel caso ci fosse una sola fase.
Mentre quello a destra mostra la relazione tra il ripple e il ciclo di lavoro (duty circle) con diverso numero diverso di fasi (N Phases = Numero Fasi), in questo caso da 1 a 6.

comportamento dei condensatori
Due condensatori presenteranno un ripple residuo minore rispetto a un condensatore.
Il diagramma in basso a sinistra mostra questo, nella parte superiore sono i due segnali PWM delle fasi, queste due correnti sommate danno come risultato la nuova corrente di uscita, che possiamo vedere nella parte bassa del diagramma con meno differenza tra il valore massimo (sul vertice) e il valore minimo (a valle).
Il diagramma a destra, mostra nuovamente il ciclo di lavoro rispetto al moltiplicatore del ripple in base al numero di fasi.
Ipotizziamo questa situazione con la classica tensione di 12V in entrata e un valore di uscita di 1.35V, con una CPU che assorbe 125 Ampere:
| VRM Input Voltage | V in = 12 V |
| VRM Output Voltage | V out = 1.35 V |
| Duty Cycle = V out / V in | D = 0.1125 (Risultato di 1.35/12) |
| CPU Max Current | I o = 125 A |
| VRM Phase Number | 4 | 6 | 8 | 16 |
|---|---|---|---|---|
| Ripple | 15,547 | 9,758 | 4,688 | 3,125 |
Come possiamo vedere la diminuzione del ripple da 4 alle 6 fasi è consistente, allo stesso modo da 6 a 8 fasi, mentre dalle 8 alle 16 fasi (parliamo quindi di 8 fasi in più) non vediamo un reale beneficio in termini di guadagno del ripple.
3) Comportamento migliorato nel Transient Response
È possibile ottenere un miglior comportamento in caso di grandi over o under-shoots delle tensioni in uscita.
Il miglioramento può essere raggiunto se le modifiche al controllo risultano più veloci di un cambiamento di una tensione di uscita.
Per ottenere questo effetto, l’alta frequenza di commutazione viene utilizzata in combinazione con una piccola induttanza della bobina, poiché la corrente scorre più velocemente con una bassa induttanza.
A differenza dei condensatori, gli induttori paralleli si comportano come resistori resistivi paralleli.
Non aggiungono, ma producono una nuova induttanza totale che è sempre inferiore alla maggiore induttanza singola.
Questa proprietà è sfruttata dal fatto che il controller pulsa tutte le fasi contemporaneamente in uno scenario transitorio conosciuto, che mette tutte le bobine in un circuito parallelo e quindi riduce significativamente l’induttanza effettiva (a seconda del numero di fasi).
Ora che i condensatori di uscita possono essere caricati più velocemente, viene impedito quindi un forte undershoot, che non può però arrivare ad un overshoot poiché viene immagazzinata meno energia nel campo delle bobine.
Ma quindi più fasi sono meglio?
Più fasi hanno anche alcuni svantaggi, oltre i vantaggi citati sopra.
Mentre le perdite ohmiche dei componenti iniziali sono diventate più piccole nel tempo, a tali perdite si sono aggiunte quelle di nuovi componenti.
Le simulazioni mostrano che i design multi-fase sono abbastanza inefficienti, soprattutto a bassi carichi, rispetto ad un numero moderato di fasi.
Molto dipende da come vengono realmente implementati quest’ultime nei VRM, e spetta quindi agli ingegneri sfruttarle al meglio.
Pertanto, la risposta a questa domanda deve essere generalmente: No, ma dipende.
Sfortunatamente, questo argomento è troppo specifico in base al caso preso in esame per dare una buona risposta generale.
Di quante fasi ho bisogno?
È consigliabile non caricare ogni singola fase con più di 30 A nel carico più elevato, e quindi valutare prima di acquistare una scheda madre con relativo processore e carico.
Si applica in modo “approssimativo” questo schema:
| Numero Fasi (N Phases) | Intesità di Corrente Max | Potenza in Uscita @ 1,3 V |
|---|---|---|
| 3 | 90 A | 117 W |
| 4 | 120 A | 156 W |
| 6 | 180 A | 234 W |
| 8 | 240 A | 312 W |
Successivamente, è necessario verificare in che modo si comportano i componenti del VRM della scheda madre alla massima corrente.
Questo poiché ci sono delle perdite che sono definite dalla qualità dei MOSFET, in base al loro range di perdita.
In quel caso i dissipatori passivi (heatsink) potranno far ben poco per ovviare a questo problema, per quanto grandi essi siano.
Ovviamente può anche accadere il contrario, ovvero con soluzioni di altissima qualità, 30 A per fase possono non aver raggiunto i limiti anche sotto carico continuo.
Quanto può essere caldo un VRM?
I transistor di potenza non possono essere utilizzati a oltre 150 ° C nella maggior parte dei casi se parliamo di fascia alta, mentre quelli di fascia media si fermano già a 125°.
Ci sono anche altri valori che non dovrebbero superare i 100° rimanendo quindi nei ratings consigliati dal produttore.
I condensatori utilizzati nei VRM, sono solitamente specificati per una temperatura operativa massima di 105 ° C.
A questa temperatura, i produttori promettono una durata di vita da 5.000 a 12.000 ore.
Questo periodo di vita si prolunga considerevolmente a temperature operative più basse.
Comunque a causa delle loro perdite piuttosto basse, non raggiungono quasi mai la fine della loro vita, ma più che altro il pericolo proviene dal surriscaldamento di altri componenti nelle immediate vicinanze.
Fondamentalmente, è necessario innanzitutto assicurarsi che cosa esattamente il sensore sulla scheda madre stia misurando e in quale punto.
Quindi deve essere valutato di conseguenza se quella stessa temperatura è considerata critica o no.
In genere, non dovreste mai essere soddisfatti del valore oltre 100 ° C e preoccuparvi nel dissipare meglio la mainboard.
Che differenza c’è tra una 4 fasi in parallelo (x2) con 4 induttori e 4 fasi in parallelo (x2) con 8 induttori?
L’unità di misura degli induttori (che misura quindi l’induttanza) è l’Henry, generalmente quella utilizzata per le mainboard è misurata in nanohenry o nH (1 nanohenry è pari a 0.000000001H).
Se abbiamo n induttori in serie, noi possiamo sostituire una serie di induttori con un unico induttore la cui induttanza è pari alla somma dell’induttanza degli induttori in serie.
e abbiamo n induttori in parallelo, noi possiamo sostituire un parallelo di induttori con un unico induttore la cui induttanza è pari al reciproco della somma delle reciproche induttanze degli induttori in parallelo.
Se nel caso della serie è facile prendiamo 3 induttori e mettiamoli in serie: 2 Henry + 2 Henry + 1 Henry = 5 Henry
Nel caso del parallelo se prendiamo 3 induttori e li mettiamo in parallelo: 2 Henry + 2 Henry + 1 Henry = 1 / ( 1/2 + 1/2 + 1/1 ) = 1 / 2 Henry
Come possiamo vedere in parallelo diminuisce l’induttanza, poiché in parallelo si ripartisce l’effetto sulle 3 induttanze.
Nella stragrande maggioranza delle volte corrisponde ad una mossa di marketing subdola da parte dei produttori di schede madri.
Infatti 2 induttori in parallelo possono tranquillamente essere sostituiti da un unico induttore più piccolo.
Metterli in parallelo non avrebbe alcuna vera utilità.
Cos’è l’Overshoot e l’Undershoot?
Fasi Reali VS Fasi False
Come possiamo vedere dall’immagine, queste sono le nostre onde quadre (con Step di carico da 45A a 193A) e mettiamo a confronto lo stesso carico su:
- Fasi sdoppiate da Doubler (Extended) [4 + 4], di base abbiamo 4 segnali dal PWM che vengono poi sdoppiati dai doubler.
- Fasi Paralle (Twin) [4 x 2], di base abbiamo 4 segnali dal PWM (NB: con 4 fasi reali non sarebbe stato lo stesso per la mancanza della metà dei MOSFET).


Come possiamo notare c’è un netto peggioramento nella salita che va oltre il limite necessario (Overshoot) e nella discesa che scende ben oltre il margine necessario (Undershoot).
Quindi i doubler determinano un peggioramento consistente nel Transient Reponse.
Ciò che vedi nell’immagine è il Transient Reponse, ovvero variazioni di carico nella risultante tensione di uscita.
Non è che il VRM con fasi reali abbia meno drop, è che il VRM con fasi reali è più veloce nell’adattarsi al nuovo scenario di carico con conseguente minor undershoot e overshoot.
Cos’è il Transient Response?
In ingegneria elettrica e ingegneria meccanica, una risposta transitoria (o Transient Response) è la risposta di un sistema a un cambiamento da un equilibrio o uno stato stazionario.
La risposta transitoria non è necessariamente legata ad eventi improvvisi ma a qualsiasi evento che influisca sull’equilibrio del sistema.
Impulse Response e Step Response sono risposte transitorie a un input specifico (ad un impulso e ad uno step, rispettivamente).
La risposta può essere classificata come uno dei quattro tipi di smorzamento (damping ratio) che descrive l’uscita in relazione alla risposta allo stato stazionario:

tipologia di Transient Response
Non Smorzata (Undamped)
Non riesce ad abituarsi al cambiamento, subendo l’oscillazione massima all’infinito.
Questo solo se non ci fossero perdite di energia ma parliamo di casi ipotetici.
Qui il rapporto di smorzamento è pari a zero (ζ =0).
Sotto-smorzata (Underdamped)
Una risposta sotto smorzata è quella che oscilla all’interno di un inviluppo (l’inviluppo di una famiglia o di un insieme di curve piane è la curva tangente a ciascun membro della famiglia in almeno un punto) in decomposizione.
Più il sistema è smorzato, e più sono le oscillazioni e più tempo impiega per raggiungere lo stato stazionario.
Qui il rapporto di smorzamento è sempre inferiore a uno (ζ <1).
Criticamente Smorzata (Critically Damped)
Una risposta fortemente smorzata è quella risposta che raggiunge il valore di stato stazionario il più velocemente senza essere indebolita.
È correlato a punti critici (utilizzati in matematica, un punto critico è un punto nel dominio della funzione in cui la funzione non è differenziabile o la derivata è uguale a zero), nel senso che si trova a cavallo del confine tra le risposte sotto e sovra smorzate.
Non dovrebbe esserci alcuna oscillazione rispetto al valore dello stato stazionario nel caso ideale.
Qui il rapporto di smorzamento è sempre uguale a uno (ζ =1).
Sovra-smorzata (Overdamped)
Una risposta sovradimensionata è la risposta che non oscilla attorno al valore di stato stazionario ma impiega più tempo a raggiungere lo stato stazionario rispetto al caso smorzato in modo critico.
Qui il rapporto di smorzamento è maggiore di uno (ζ >1).

Proprietà dell’onda che si crea nel Transient Response
Tempo di risalita (Rise Time)
Il tempo di salita si riferisce al tempo necessario affinché un segnale passi da un valore basso specificato a un valore alto specificato.
In genere, questi valori sono 10% e 90%.
Overshoot
Il superamento è quando un segnale o una funzione supera il suo obiettivo.
È spesso associato al ringing ovvero una oscillazione indesiderata della tensione.
Succede quando un impulso elettrico fa sì che le capacità parassite e le induttanze nel circuito risuonano alla loro frequenza caratteristica.
Nelle onde quadre viene chiamato Fenomeno di Gibbs.
Tempo di assestamento (Setting Time)
Il tempo di assestamento è il tempo trascorso dall’applicazione di un step input istantaneo ideale, dal momento in cui l’output è entrato ed è rimasto all’interno di una specifica banda di errore.
Tempo di ritardo (Delay Time)
Il ritardo è il tempo necessario affinché la risposta raggiunga inizialmente la metà del valore finale.
Tempo di picco (Peak Time)
Il tempo di picco è il tempo necessario affinché la risposta raggiunga il primo picco di overshoot (ovvero di superamento dell’obiettivo).
Errore di stato stazionario (Steady-State Error)
L’errore di stato stazionario è la differenza tra l’uscita finale desiderata e quella effettiva quando il sistema raggiunge uno stato stabile, quando è prevedibile che il suo comportamento continui se il sistema è indisturbato.